Bezetmelding
LDR
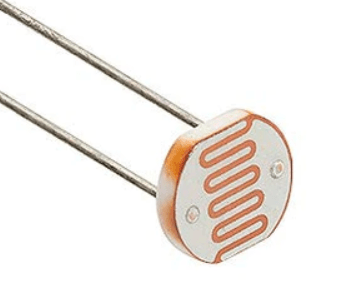
LDR staat voor light depended resistor of in NL: licht gevoelige weerstand. Zoals de naam al zegt, is het weerstand waarvan de waarde verandert als de hoeveelheid licht verandert bijvoorbeeld als er een trein over heen rijdt. Je kan ze dus prima gebruiken op de modelspoorbaan voor de detectie van treinen of andere dingen. Het zijn erg goedkope dingen van rond de €0,20.
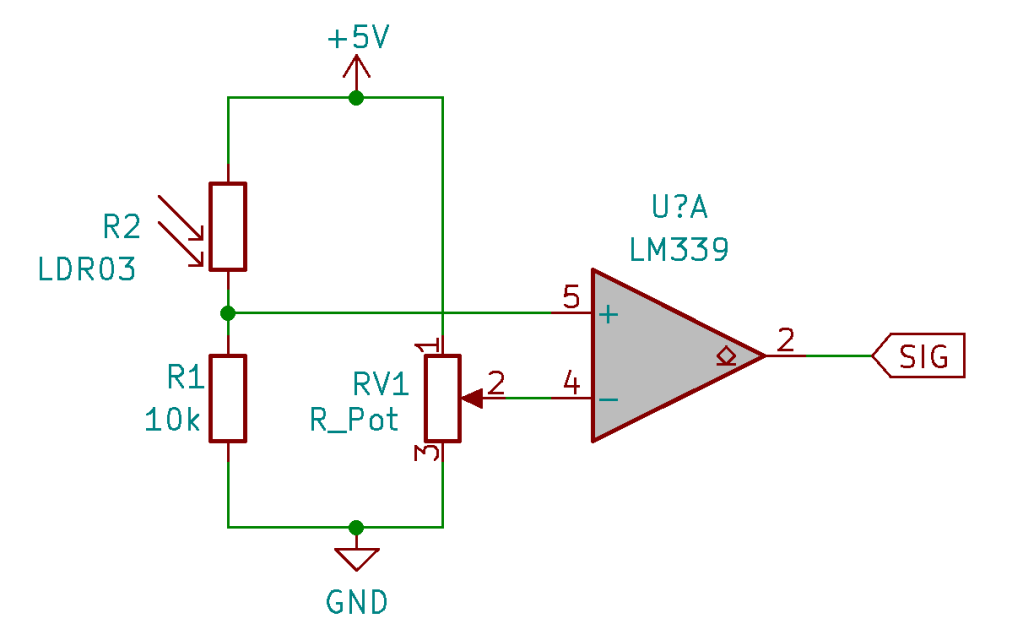
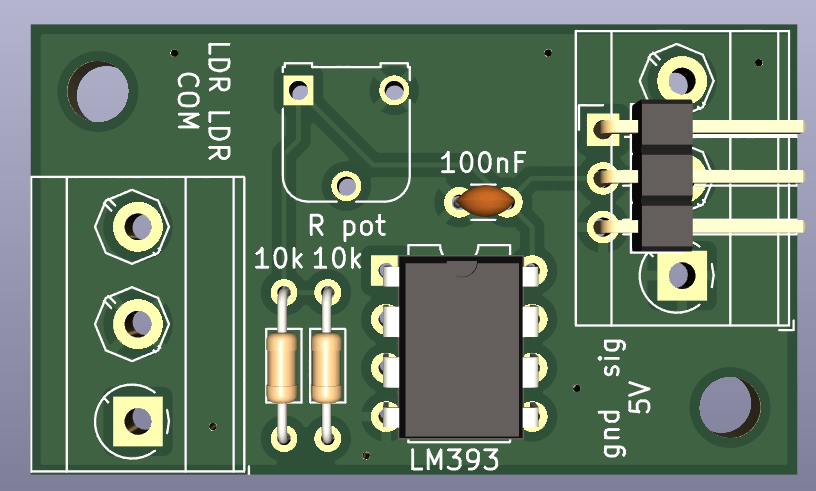
Om een LDR te gebruiken, kan je gebruik maken van een comperator. Een nadeel is wel dat je dan een absolute drempelwaarde heb. Bij een te sterke variërende of te lage achtergrondbelichting zou dit circuit niet helemaal goed kunnen werken.
De comperator ‘vergelijkt’ het analoge signaal van de LDR met een instelpotmeter. De uitgang SIG is versterkt en is hier of +5V of 0V
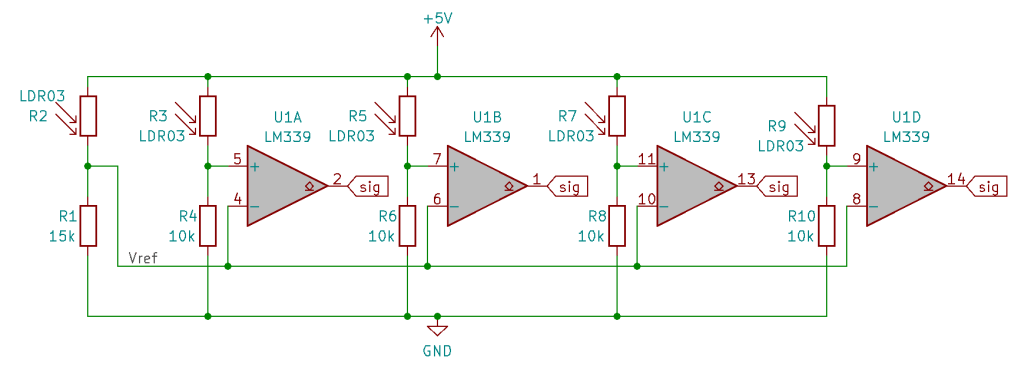
Als een variërende omgevingslicht toch vervelend blijkt te zijn zou je ook een extra LDR als referentie kunnen gebruiken. Dan is er geen keiharde aan of uit drempel.
De meest linker LDR is met een grotere weerstand aangesloten op alle – poten van alle comperators. Deze maakt de referentiespanning en deze zal mee hobbelen met de omgevingslicht. De referentie LDR moet wel op een plek zitten waar die geen last heeft van externe invloeden zoals treinen ed.
Een LDR kan je gebruiken in combinatie met een Arduino
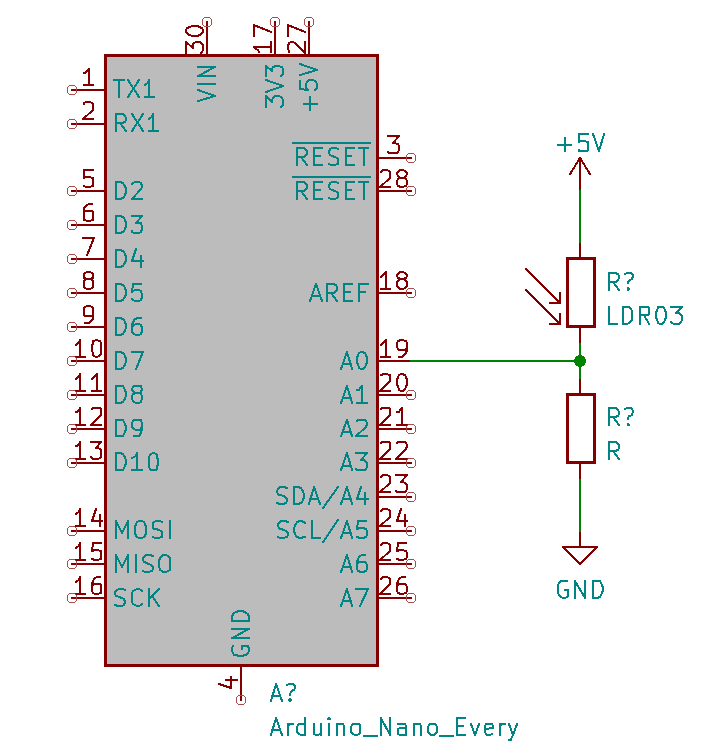
Het gebruik van een LDR icm een Arduino geeft je flexibiliteit. Als je bijvoorbeeld last heb van een veranderende omgevingslicht dan kan je dat verschil makkelijker oplossen met een software oplossing.
Stroomdetectie
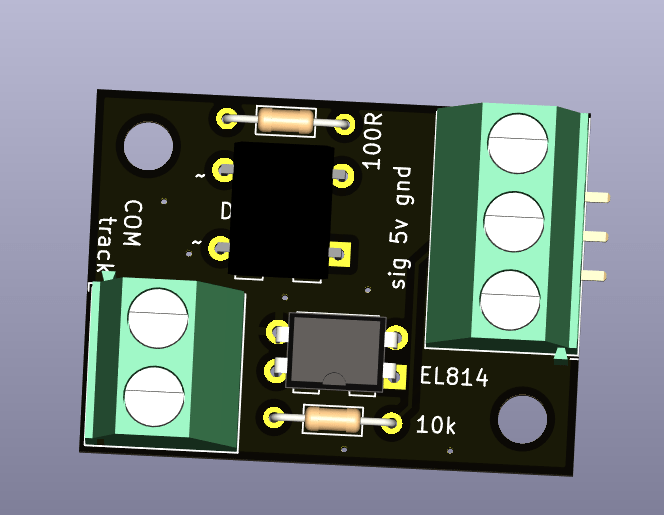
Een meer betrouwbare methode om trein te detecteren is door middel van stroomdetectie. Er zijn meerdere manieren om dit te bereiken. Je kan gebruik maken van thoroïdes (ronde ijzeren ringen met koperwikkelingen), speciale stroommeet IC’s of de simpele optocoupler en gelijkrichter methode. Dat laatste is wat ik hier ga uitleggen. Dit circuit is makkelijk te maken omdat er zo weinig componenten bij komen kijken.
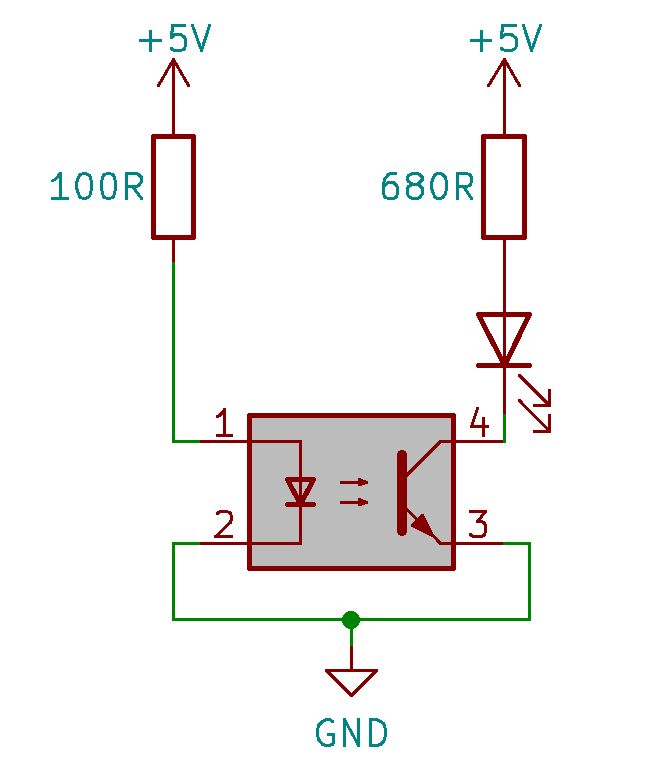
De basis bestaat uit een gelijkrichter, weerstand en een optocoupler. Wanneer er een trein rijdt over het aangesloten stuk spoor, dan gaat er een stroom vloeien van de ringleiding, door de gelijkrichter naar het spoor en naar de trein. Over de gelijkrichter, zal een spanningsval van grofweg 1,4V ontstaan. Deze 1,4V is hoog genoeg om de IR led in de optocoupler open te sturen. Het is hier wel voor nodig dat er een kleine serie weerstand in serie komt met de IR led.
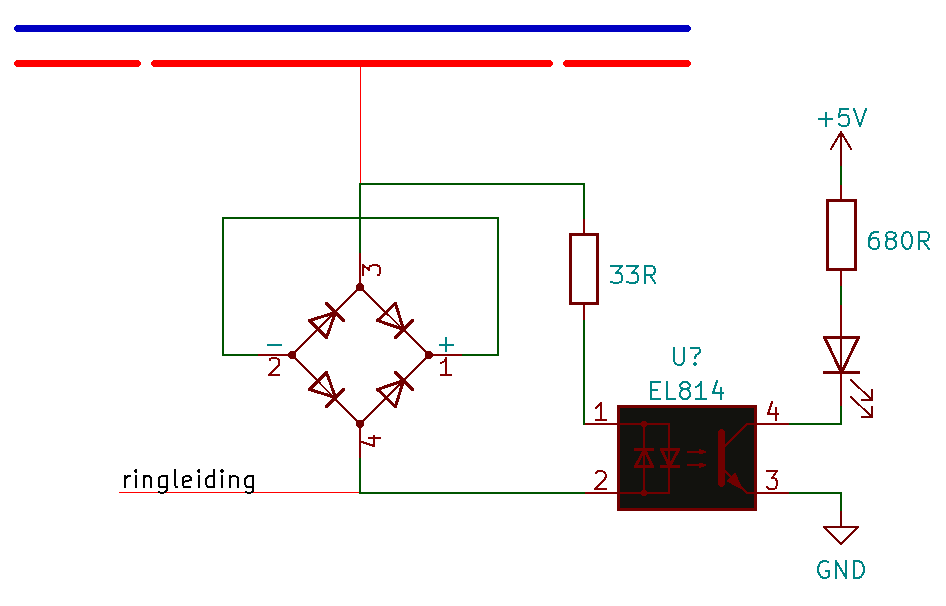
Wanneer de optocoupler wordt opengestuurd, kan je met de transistor iets schakelen zoals een led op een schakelpaneel of een digitale pin van een arduino.
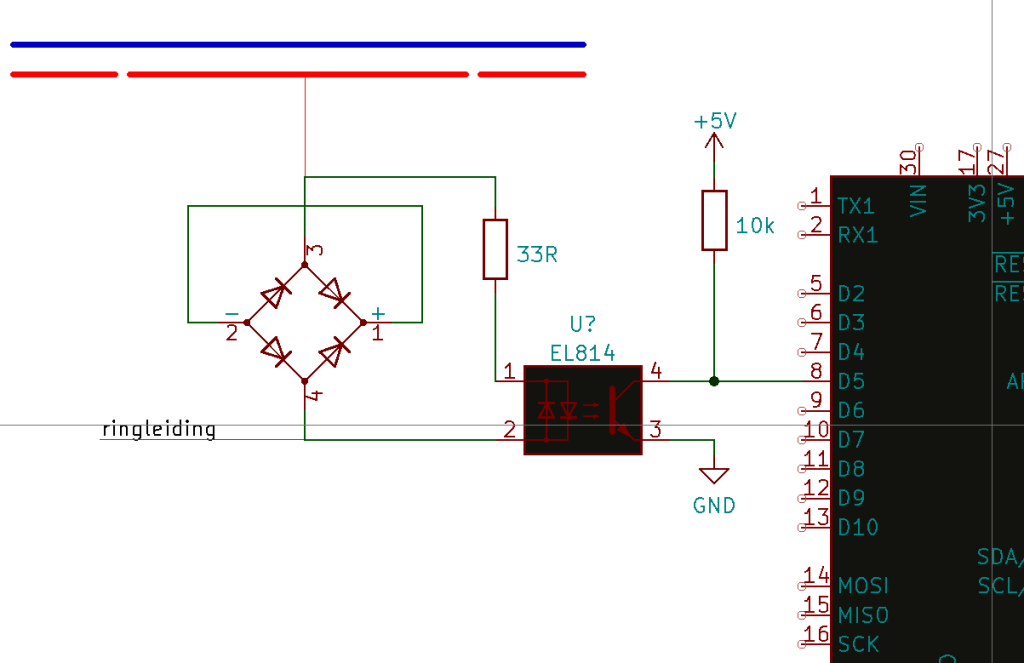
Stroomdetectie wordt voornamelijk gebruikt voor digitale banen. Dit komt door de digitale spanning continu op de rails staat, dus ook wanneer de trein stilstaat. Er is slechts een paar mA voor nodig om dit circuit te laten werken. De optocoupler vormt een galvanische scheiding tussen de baanspanning en de arduino. De arduino loopt hierdoor geen gevaar van beschadiging.
Stroomdetectie is minder handig voor analoge treinen, omdat het zijn werking verliest zodra de trein stilstaat. En afhankelijk van wat je er mee wilt doen, kan dit wel of niet handig zijn.
Wat wel een tamelijk uniek voordeel is van stroomdetectie bij analoge treinen, is het feit dat je ze directioneel kan laten werken. In simpelere woorden, je kan je schakeling gevoelig maken voor maar 1 richting. Dit doe je door de AC type optocoupler te vervangen door een DC type (en een anti parallel diode)
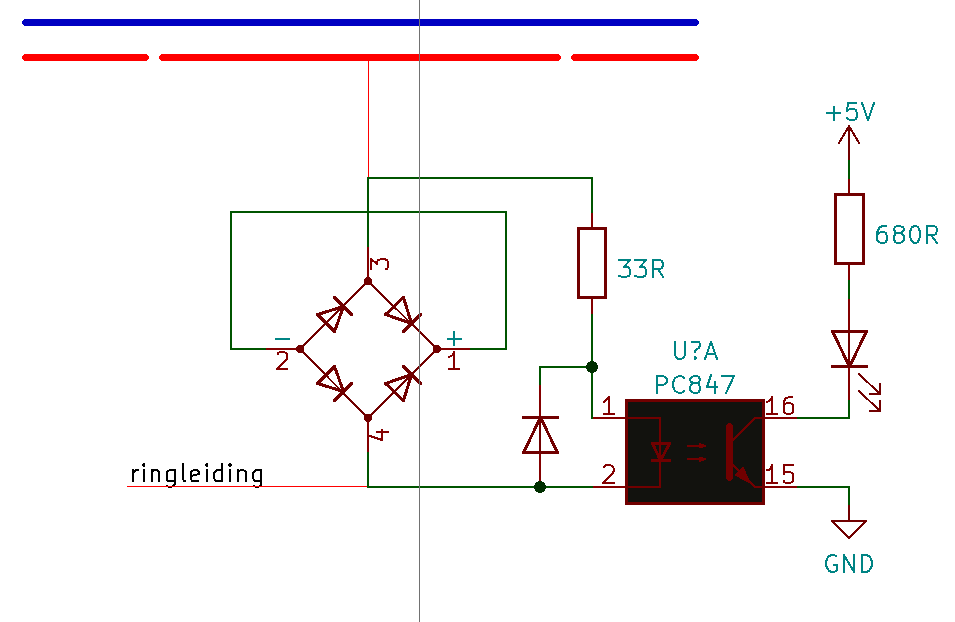
Dit circuit werkt maar in 1 richting. In de andere richting zal de stroom door de antiparallel diode lopen.
Een ander kenmerkend nadeel van dit systeem, is de spanningsval van 1.4V. Op een digitale baan maakt dit niet zo veel uit omdat de digitale decoders cruisecontrol hebben. Zodra ze merken dat de snelheid inkakt als gevolg van een lagere spanning, zal de decoder zo snel bijregelen dat we er niks van merken. Als je heel goed kijkt, zal je hoogstens de frontverlichting en binnenverlichting een iets andere helderheid krijgen door de spanningsval.
Op een analoge trein met dit circuit zal je wel degelijk een sprong zien in de snelheid. Bij een analoge trein is de spanning evenredig met de snelheid. Zakt de spanning? Dan zakt de snelheid mee.
Het circuit kent nog een nadeel. Een trein wordt pas gedetecteerd als alle stroomafnemende assen op het gedetecteerde stuk staan. Ook dit voor- of nadelig zijn afhankelijk van je toepassing.
Gelukkig zijn deze problemen erg makkelijk op te lossen door een extra diode te gebruiken voor de niet-gedetecteerde stukken.

Het niet gedetecteerde hoofdspoor is op deze wijze nu ook met dezelfde 1.4V verlaagd waardoor er geen spanningsverschil meer bestaat tussen niet- en wel gedetecteerde secties. Een trein wordt nu ook al gedetecteerd zodra deze met de eerste stroomafnemende as op het gedetecteerde sectie komt.
Lichtsluis
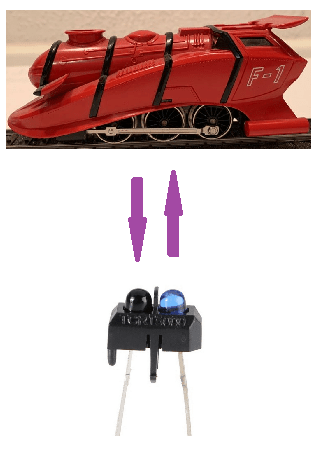
De infrarode (IR) lichtsluis is ook een makkelijke en tevens betrouwbare manier om een trein te detecteren. Er zijn meerdere IR sensoren beschikbaar van goedkoop tot duur. Bij een IR sensor maak je gebruik van een IR LED icm een IR gevoelige ontvanger. De LED straalt IR licht, wat wij niet kunnen zien en de ontvanger ziet dat licht (tenzij er een trein in de weg staat)
IR sensoren kan je op 2 manieren toepassen, je hebt de reflectie methode waarbij je zender en ontvanger naast elkaar zitten. In rust kan de ontvanger het licht niet waarnemen. Pas wanneer een object zoals bijvoorbeeld een trein in de buurt komt, zal de trein het licht van de led weerkaatsen naar de sensor.
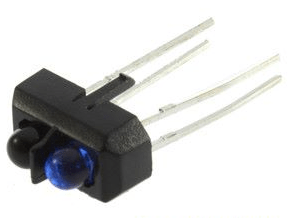
Om deze sensor (TCRT500) te gebruiken zijn er niet veel componenten nodig. In feite is het een optocoupler met een iets andere opbouw.
Deze sensor kent echter een groot nadeel. Hij is erg gevoelig voor omgevingslicht. Als je een goed gecontroleerde omgeving heb, kan dit een prima sensor zijn, maar als je voor het zeker wilt kiezen, kan je beter kijken naar de IS471FE.
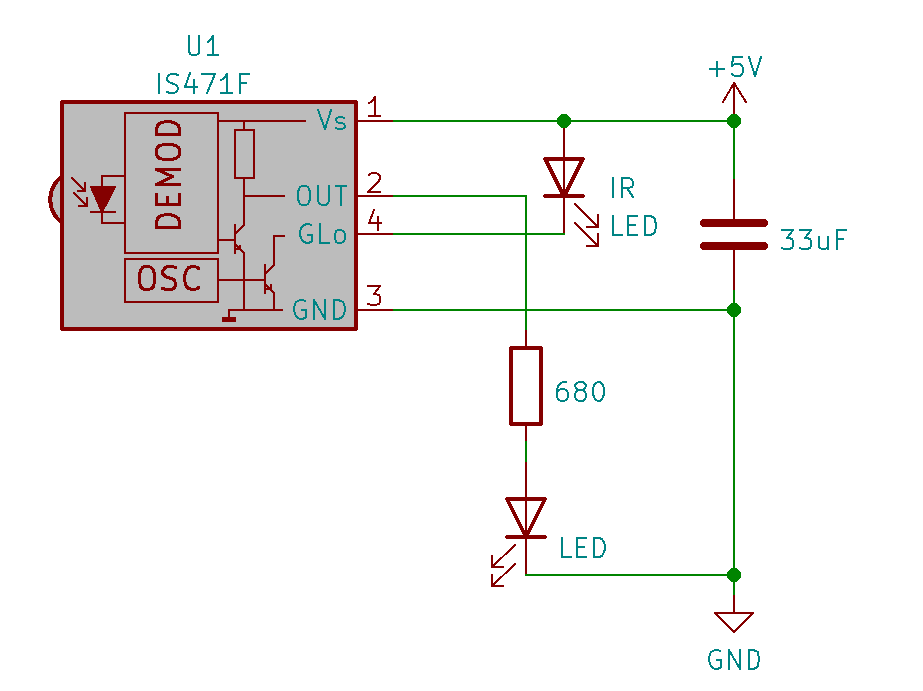
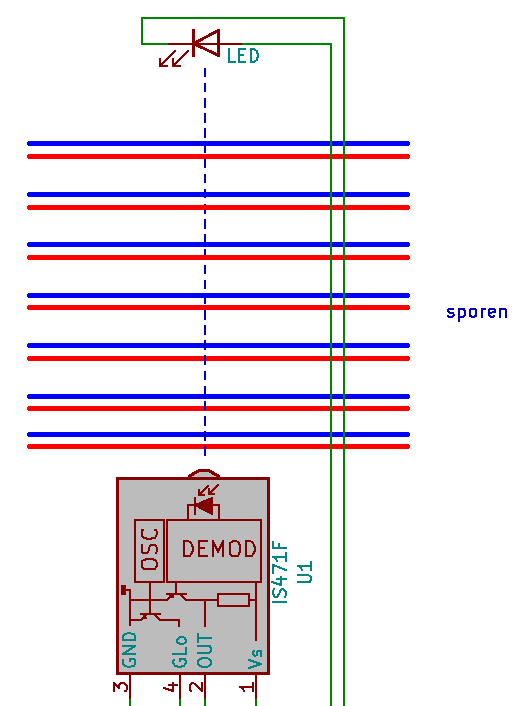
De Sharps IS471FE is een robuustere sensor die nagenoeg geen last heeft van omgevingslicht. De sensor heeft een aparte aansluiting voor een IR LED. Deze LED behoeft hierbij geen voorschakelweerstand.
Deze sensor kan ook als reflectie sensor gebruikt worden. Je kan ontvanger en zender inbouwen tussen je de bielzen van je spoor of je gebruikt hem echt als lichtsluis door de led tegenover de ontvanger te plaatsen.
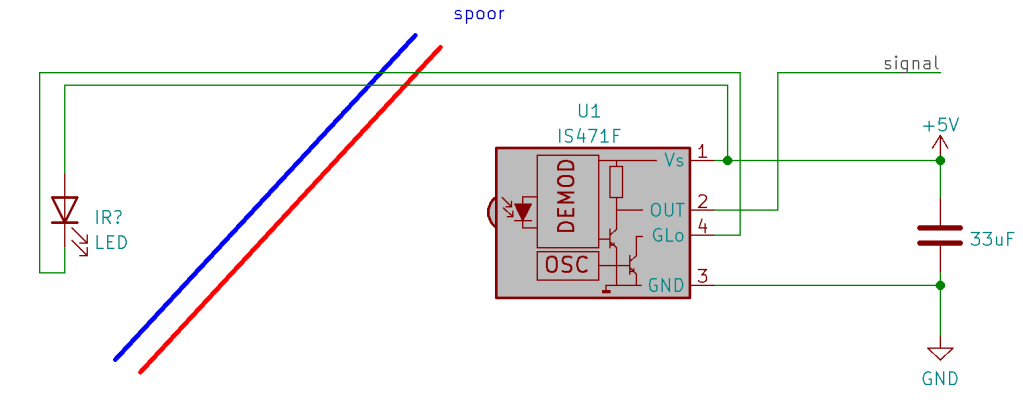
Afhankelijk van je toepassing doe je er goed aan om de sensor schuin te zetten ten opzichte van het spoor. Dit voorkomt dat de sensor afvalt bij de luchtspleten tussen wagons.
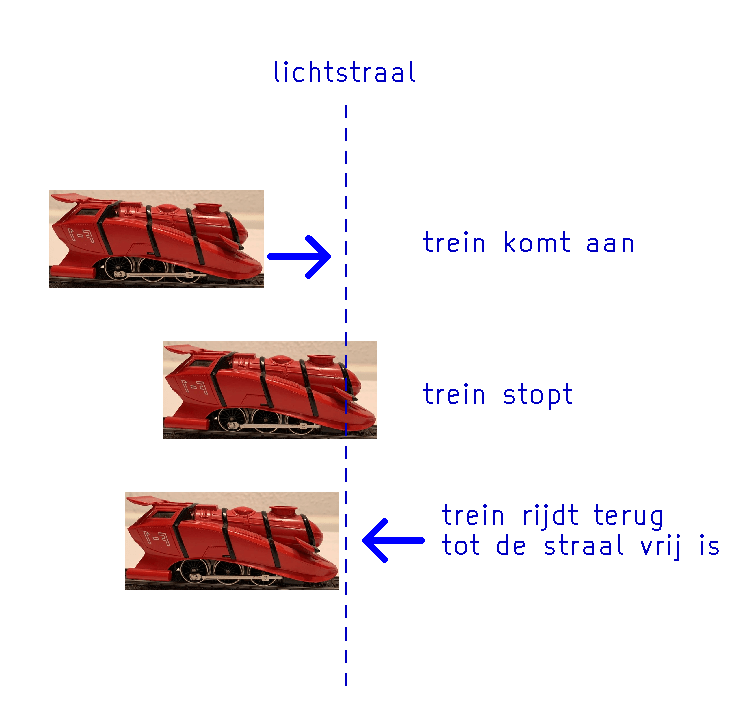
Anderzijds, als het nu je doel is om een koppeling boven een ontkoppelaar stil te zetten dan is het natuurlijk wel nodig dat de sensor de luchtspleet kan zien. In het programma koploper is het bijvoorbeeld mogelijk om een sensor over meerdere sporen te plaatsen. Een trein rijdt dan tot in de lichtstraal en dan een stukje achteruit zodat de lichtstraal weer vrijkomt zodat een andere trein er gebruik van kan maken.
Het voordeel met deze methode is dat je A). niet in je rails hoeft te zagen om bezetmelders te maken. En B). je kan 1 terugmeldcontact gebruiken voor meerdere sporen.
Het bereik van deze IR sensor is soms ontoerijkend. De bovengenoemde sharps sensor zal het waarschijnlijk ook niet redden om 7 sporen te overbruggen. Er bestaan ook setjes met laser zenders en ontvangers.
Servomotors
Een servomotor is een motor waarop een vleugel of arm zit. De motor kan deze arm naar een bepaalde hoek sturen, meestal tussen 0° en 180°.

Doordat de servo motor in elke stand tussen de 0° en 180° graden kan staan, zijn ze handig voor meerdere toepassingen. Je moet hier denken aan wissels stellen, armseinen aansturen, deuren van een lokloods bedienen, een kraan laten bewegen etc
Een servomotor zoals de SG90 moet aangestuurd worden met een PWM signaal met een frequentie van 50Hz. De positieve pulslengte moet tussen 1ms en 2ms zijn. Dit komt overeen met de standen 0° en 180° respectievelijk. Het PWM signaal kan op meerdere manieren opgewekt worden.
Een servomotor zal onconditioneel de arm in de aangestuurde stand zetten or it will die trying. In geval van bovenstaande motor zal het laatste zeker het geval zijn wanneer de arm fysiek geblokkeerd wordt. De plastic tandwielen overleven dat niet.
In het geval van een servo met metalen tandwielen, zal de motor niet snel stuk gaan. Wel blijft de motor aangestuurd worden totdat de aangestuurde stand bereikt is. Als de motor dat dus niet haalt, zal er continu een hoge stroom door de motor gestuurd worden en de motor maakt dan een brommend geluid. Om deze reden is het soms wenselijk om een servo af te schakelen nadat de stand bereikt is. Als je wissels wilt aansturen met servo’s dan is dit wenselijk.
Analoge aansturing
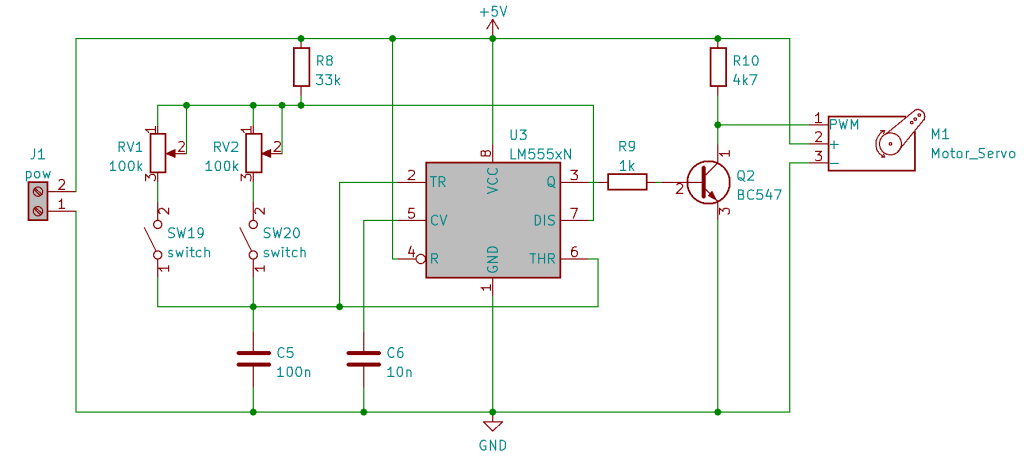
De makkelijkste DIY manier om de 50Hz PWM signalen op te wekken, is door gebruik te maken van de beruchte 555 timer. Dit kan op meerdere manieren gedaan worden met schakelaars voor absolute standen of met een potmeter waarmee je zelf de stand kan kiezen. Het volgende schema maakt gebruik van 2 potmeters en 2 schakelaars. Met de schakelaars kan je de servo naar 1 van 2 standen sturen, met de potmeters kan je deze 2 standen instellen.
Als geen van de schakelaars wordt gebruikt, schakelt de motor af.
Digitale aansturing
Het gebruik van een 555 timer heeft ook zijn nadelen. Het werkt niet altijd even stabiel en je hebt weinig tot geen controle over de snelheid. Normaliter als je een servo beweegt van stand X naar stand Y doet de servo dit op volle snelheid.
Om dat probleem te tackelen, kan je vanuit de aansturing de motor telkens 1° per keer laten opschuiven. Zo kan je een vloeiende langzame beweging maken met een servo. Dit helpt ook enorm goed tegen het geluid wat deze motoren kunnen maken.
Arduino’s en losse attiny chips zijn ideaal om servo’s mee aan te sturen. Om een servo makkelijk aan te kunnen sluiten op een arduino nano icm een IO base shield
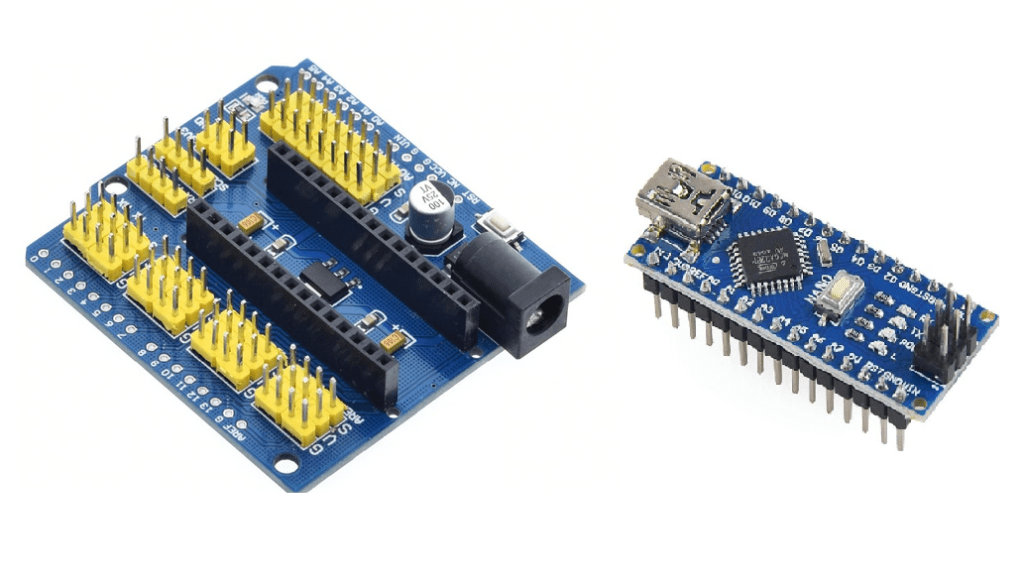
Op dit IO shield kan je direct servo motors pluggen. Je kan ze o.a. hier kopen:
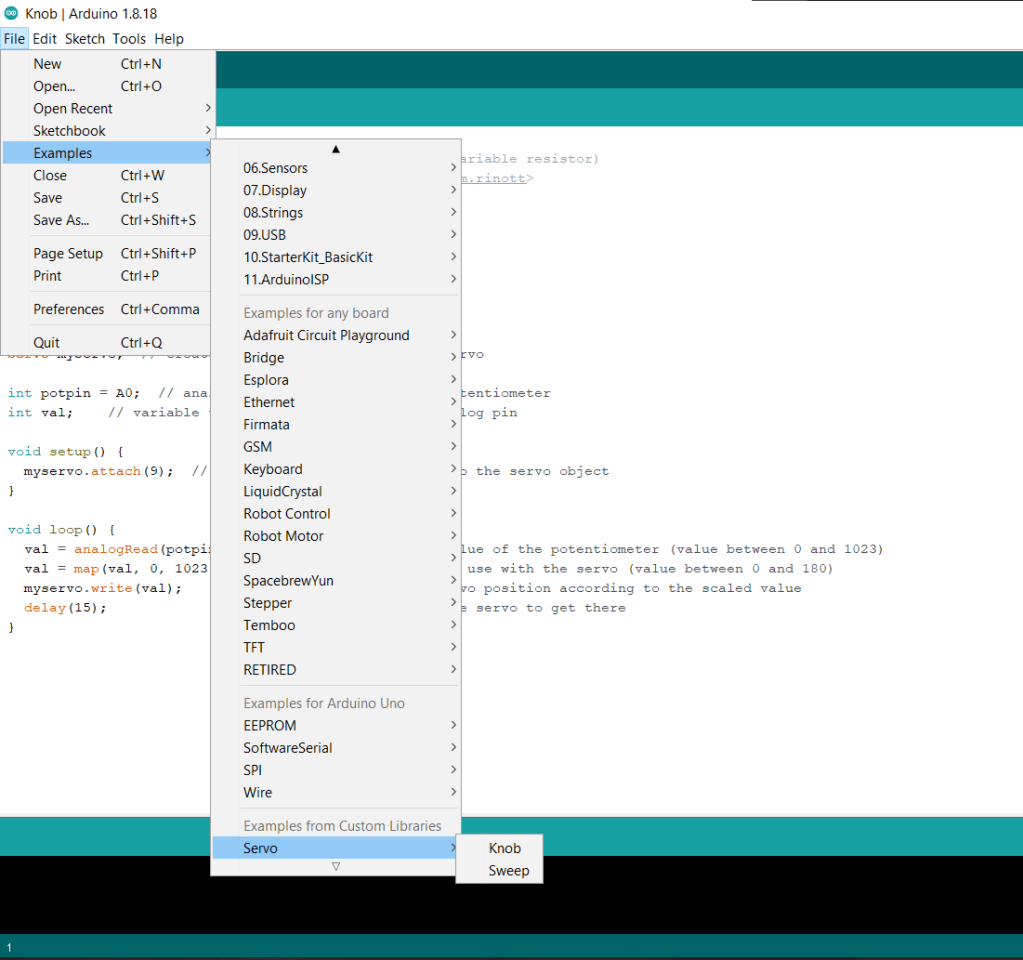
Om een arduino een servo te laten bewegen, moet je hem programmeren. Gelukkig heeft de Arduino Foundation voor ons een makkelijk te gebruiken library gemaakt met twee voorbeeld programma’s. Je vindt ze in examples -> Servo -> Knob of Sweep. Knob laat de servo een stand van een potmeter volgen, Sweep stuurt een servo continu aan (met vertraging) van 0° tot 180°.
Tevens heb ik een klein PCB ontwerp om een servo motor aan te sturen met een kleine attiny chip. Servo Driver
Stappenmotoren
Stappenmotoren zijn motoren waarbij de rotor (roterende deel in een motor) een permanente magneet heeft. De stator (stilstaande deel in een motor) heeft verscheidene spoelen die als elektromagneet fungeren. Deze spoelen kunnen dan omstebeurt duwen en trekken aan de magneet van de rotor om zo de as te laten draaien. Het makkelijke van een stappenmotor is dat je makkelijk kan bijhouden vanuit de aansturing hoeveel stappen je precies gezet heb. Zo kan je zonder externe terugmelding een stappenmotor positioneren. In tegenstelling tot een servo motor kan een stappenmotor oneindig veel rondjes draaien.
Hoewel je wel een analoog circuit kan ontwikkelen om dit soort motoren aan te sturen, is dat achterhaald. Het is ook voor stappenmotor beter om een Arduino te gebruiken. Net als voor servo’s heeft Arduino ook een library voor stappenmotors genaamd ‘stepper.h’ (stepper is Engelse benaming voor stappenmotor)
Stappenmotoren bestaan hoofdzakelijk in twee soorten. Er bestaan unipolaire stappenmotoren en bipolaire stappenmotoren.
Unipolaire stappen motoren
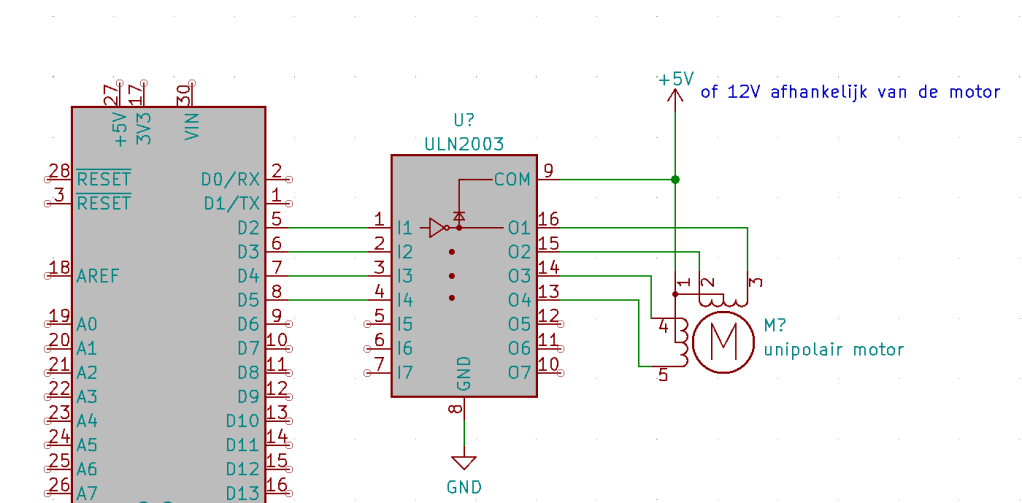
In unipolaire stappen motoren zitten drie, vier of meer spoelen die een gemeenschappelijke aansluiting hebben, doorgaans is dit de positieve aansluiting.
Een besturing zoals een arduino kan dan deze spoelen 1 voor 1 naar 0V schakelen met een versterker chip zoals een ULN2003. Ik wil hierbij opmerken dat deze spoelen een inductieve belasting zijn. Er zijn zodoende blusdiodes nodig de versterker te beschermen. De ULN2003 heeft deze intern. Je kan ook setjes kopen met motor en versterker print, zoals deze:
Bipolaire stappen motoren
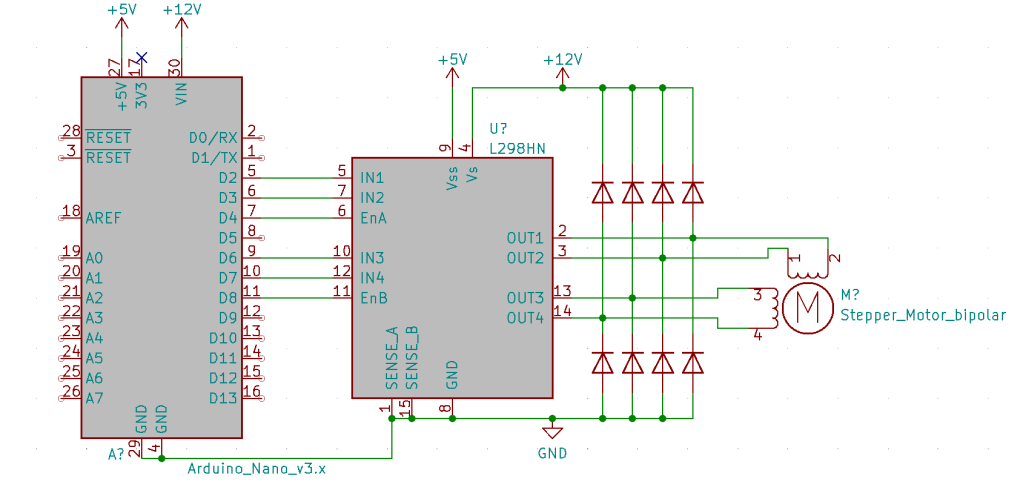
Bij bipolaire stappenmotoren zijn de spoelen ander ingericht opdat ze ook omgepoold kunnen worden. De spoelen kunnen dan niet alleen trekken aan de rotor magneet maar ze kunnen ook duwen.
Bipolaire motoren hebben meer kracht dan unipolaire stappenmotoren, ze kunnen doorgaans sneller bewegen en ze kunnen extra nauwkeurig positioneren door een techniek wat microstepping wordt genoemd.
Om een bipolaire stappenmotore aan te sturen, heb je een andere versterkerchip nodig. Een dubbele H-brug volstaat hierin. Ook zijn er speciale chips ontworpen om dit soort motoren aan te sturen. Deze kan je kopen als een klein boardje. Een voorbeeld hiervan is de A4988. Deze chips zijn ook degene die de microstepping ondersteunen. Met deze chips kan je een motor stop zetten op 16 kleine stapjes (mircostappen) tussen 2 volledige stappen. Hoe dat precies werkt, laat ik hier achterwege.
Deze H-brug kan je ook als kant en klare module kopen
DC motoren
Een DC motor is een motor met 2 aansluitingen die je aantreft in het merendeel van onze modeltreinen. Dit zijn die ronde zilveren dingen die je in bijna elke lok aantreft.
Om een DC motor te laten draaien, moet je een gelijkspanning aanbieden op de 2 aansluitingen. De motor draait dan een kant op. Hoe hoger de spanning is, hoe sneller de motor draait. Als een DC motor belast wordt, zal de snelheid iets afnemen en het stroomverbruik zal toenemen.
Om de motor de andere kant op te laten draaien, moet je de polariteit omdraaien door bijvoorbeeld de draadjes om te draaien.
Wat men meestal doet en wat bijna alle lok decoders ook doen, is om een DC motor aan te sturen met een H-brug. Schematisch ziet dat er zo uit.
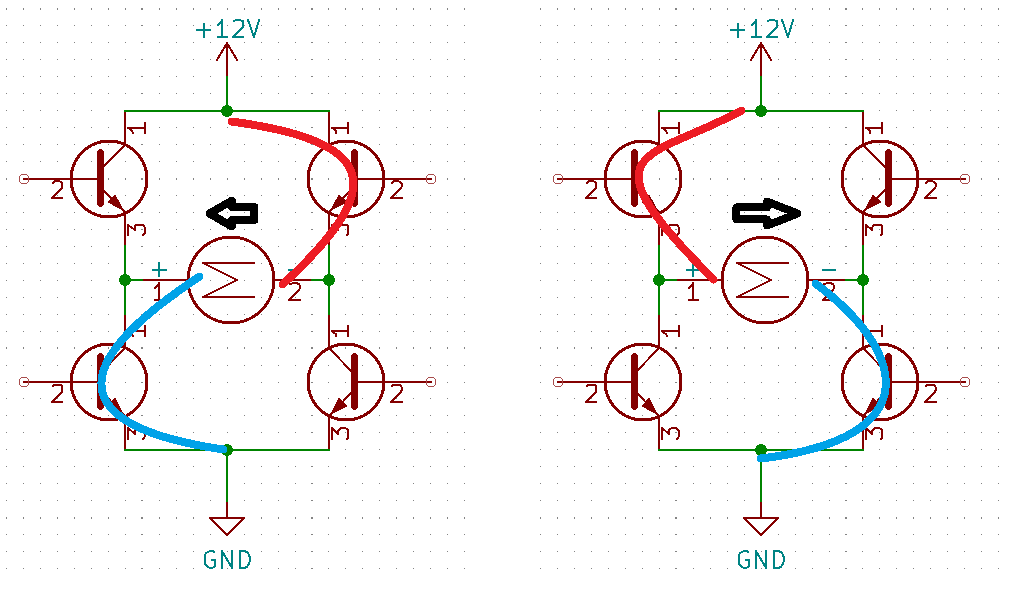
Door de transistors op de juiste manier te schakelen, kan je een DC motor in beide richtingen laten draaien.
Met de transistors in deze opstelling, is het niet mogelijk om de spanning te regelen. Om toch de snelheid te regelen, maken we gebruik van PWM
DC motoren houden van lage frequenties tussen de 20Hz en 300Hz. Boven de 100Hz begint het geluid lichtelijk irritant te worden. Onze decoders schakelen met ongeveer 32kHz. Dit is niet erg efficient, maar dit ook boven onze gehoorgrens. Daardoor horen we de motoren van onze treinen nagenoeg niet. Doordat de decoders terugkoppeling hebben dan de motoren, kunnen ze de snelheid erg fijn regelen.
Als jezelf met een arduino en met een H-brug wilt experimenteren kan je een losse H-brug kopen. Je kan een ook een bijbehorend motorshield kopen.
Schakelaars
Er zijn vele soorten op de schakelaars op de wereld. Om een keuze te kunnen te maken is het belangrijk dat je de gebruikte begrippen snapt. Dit voorkomt ook dat je verkeerde schakelaars koopt of gebruikt.
Sommige schakelaars hebben ingebouwde ledjes zodat je een verlicht paneel kan maken. Lees dus altijd goed de beschrijving van dat wat je koopt.
Toggle switches
Deze schakelaars bestaan in erg veel varianten. Ze worden meestal MTS (Manual Transfer Switch) genoemd. Dat betekent eigenlijk alleen maar dat een hand bediende schakelaar is. Ik ben ook de afkorting: Miniature Toggle Switch tegengekomen.
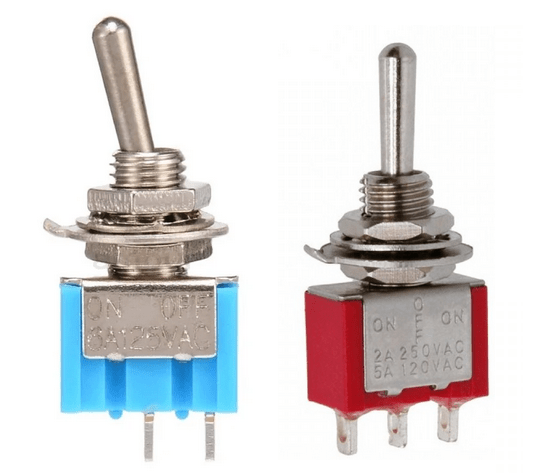
Deze schakelaars kunnen 1-polig, 2-polig of zelfs 3-polig zijn. Elke pool is een apart contact in de schakelaar die niet is doorverbonden aan een van de anderen.
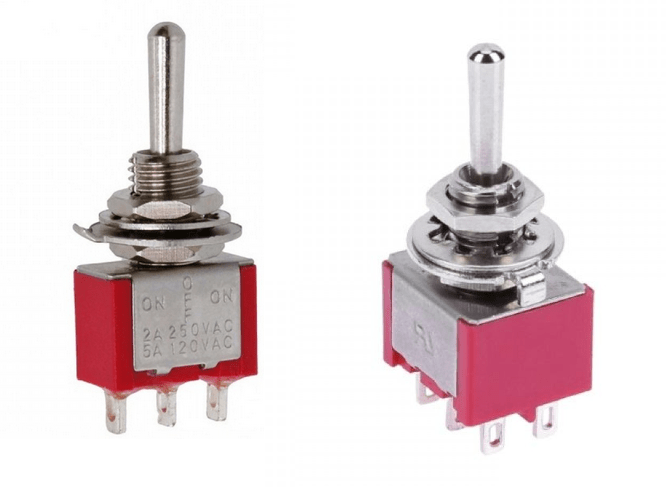
Er zijn ook meerdere manieren waarop deze schakelaars schakelen. Een contact kan een enkele contact zijn (single throw) of het kan een wisselcontact zijn (double throw).
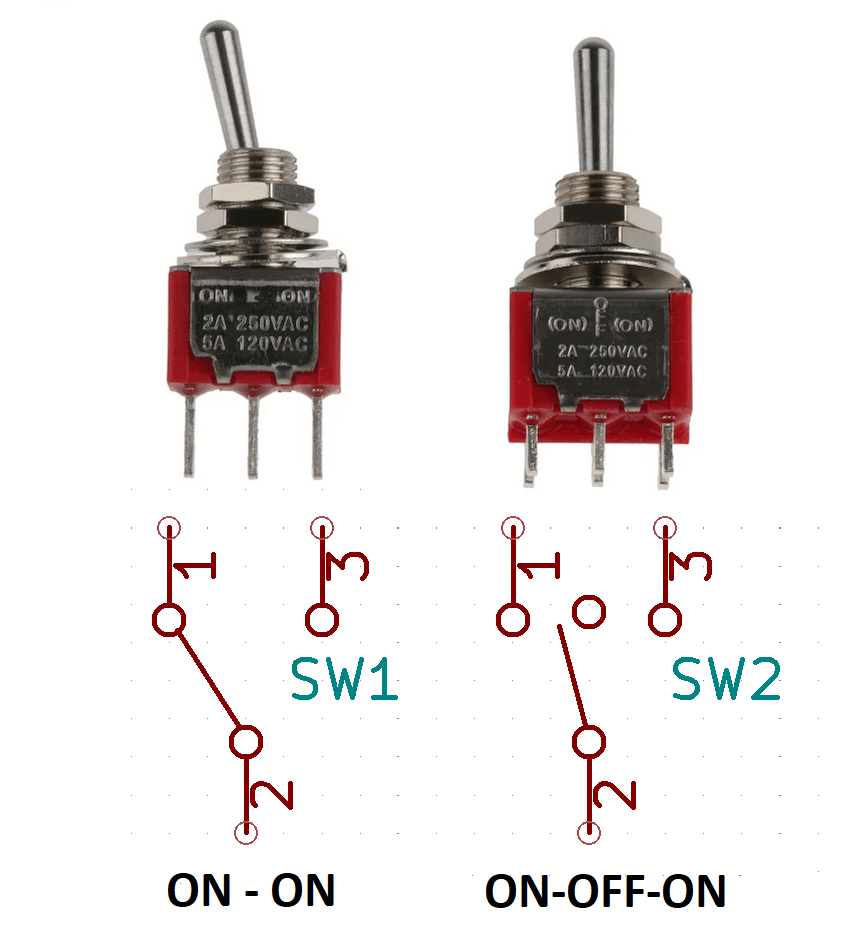
De linker schakelaar kan slechts het midden contact verbinden aan het rechter contact. De rechte schakelaar kan het midden contact verbinden of het linker of het rechter contact. Dit is altijd tegenovergesteld met de stand van de schakelaar. Wijst de schakelaar naar links, dan is midden verbonden met rechts.
Een Double Throw schakelaar kan ook een uit-stand hebben. Deze schakelaar heeft dan 3 standen.
Het laatste aspect is de ruststanden van de schakelaars. Sommige van de schakelaars hebben bepaalde neutrale standen. Dan veren ze automatisch terug naar deze stand. Als we kijken naar een SPDT schakelaar allen, zijn er meerdere variaties.

De SPST heeft maar drie variaties (hoewel de derde niet veel voorkomt)
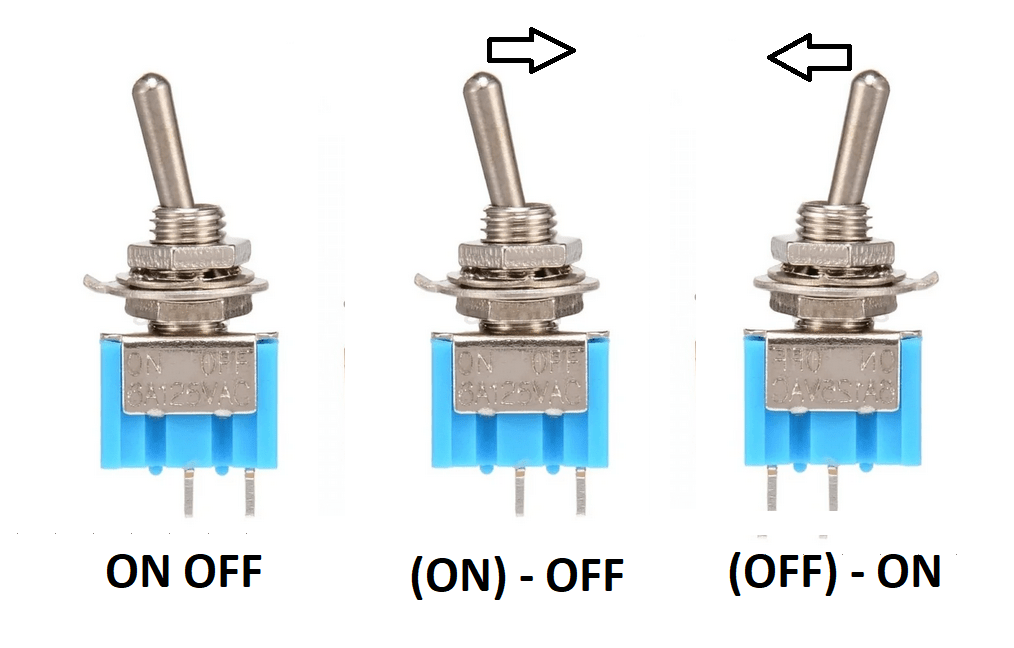
Alle ONs en OFFs die tussen () haken staan. Die zijn niet neutraal. Dat wil dus zeggen dat ze niet in deze standen blijven staan als je de schakelaar los laat.
Als je op bijvoorbeeld Farnell of Aliexpress gaat zoeken op deze schakelaars dan zie je de volgende notaties:
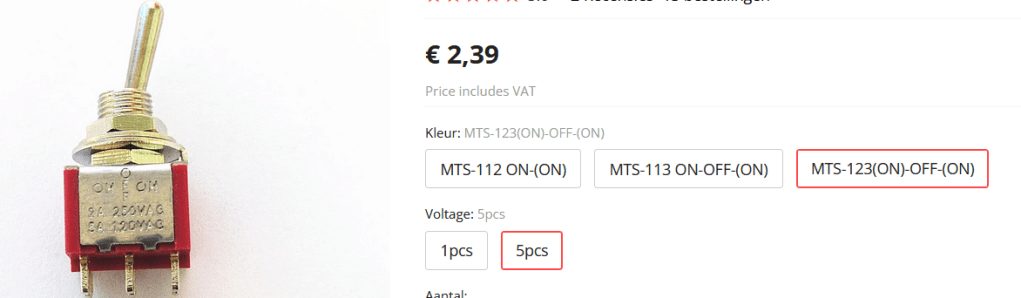
MTS betekent hier dus ‘miniature toggle switch. Daarachter staan 3 getallen. Het eerste getal (hier 1.) betekent dat de schakelaar 1 polig is. Het tweede getal geeft weer hoeveel van de standen terugveren. Dat kan zijn: 0. de schakelaar veert niet naar een neutrale stand. 1. betekent dat 1 contact terug veert. En 2 betekent dat 2 contacten terugveren (bijvoorbeeld de derde optie). Het derde getal in de reeks geeft aan hoeveel standen de schakelaar kent. Dit is of een 2 (Single throw) of een 3 (Double throw).
Schakelaars zoals deze zijn bedoeld om draadjes aan te solderen. Je kan ze gebruiken om zelf een schakelpaneel oid mee te maken.
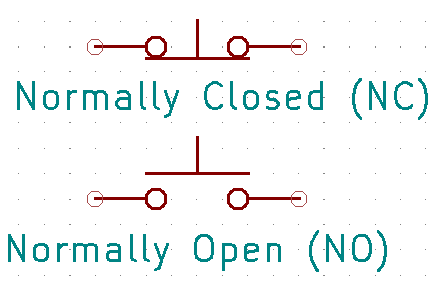
Push switches
Push switches of drukschakelaars bestaan in bijna oneindig veel vormen en maten. Er zijn hoofdzakelijk maar twee aspecten waar je naar hoeft te kijken. Een schakelaar kan normally open of normally closed zijn. Bij normally open, maakt de schakelaar geen contact in rusttoestand. Als je deze schakelaar indrukt, maakt hij wel contact. Bij een normally closed schakelaar zit het precies andersom.
Verder kan een schakelaar een momentschakelaar zijn of een ‘locking’ type. Een locking schakelaar die kan zich zelf vast locken in beide standen. Een momentschakelaar heeft een neutrale ruststand waar deze naar terug veert als je hem niet indrukt.
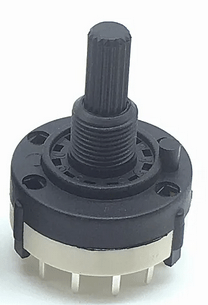
Rotary Switches
Er bestaan ook draaischakelaars, vaak met meer dan drie standen.
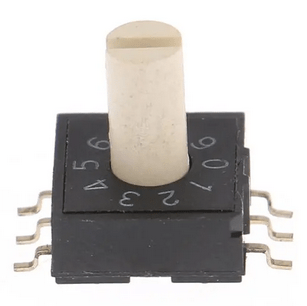
Er zijn zelfs 12 standen schakelaars. Sommige van deze schakelaars kunnen ook meer polig zijn. Kijk daarom goed wat je koopt als je een meerstandenschakelaar zoekt.
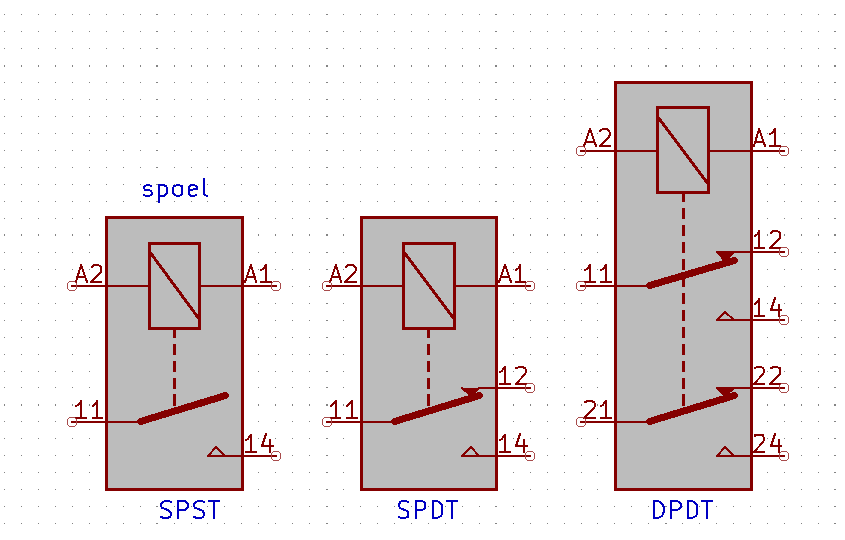
Relais
Relais zijn feitelijk ook schakelaars, maar ze zitten in een behuizinkje en je kan ze op afstand bedienen door een spoel (elektromagneet) in het relais te bekrachtingen met een stroom.
Relais bestaan net als schakelaars is enkel of dubbel polige uitvoering. En relais kunnen Single Throw of Double Throw zijn.
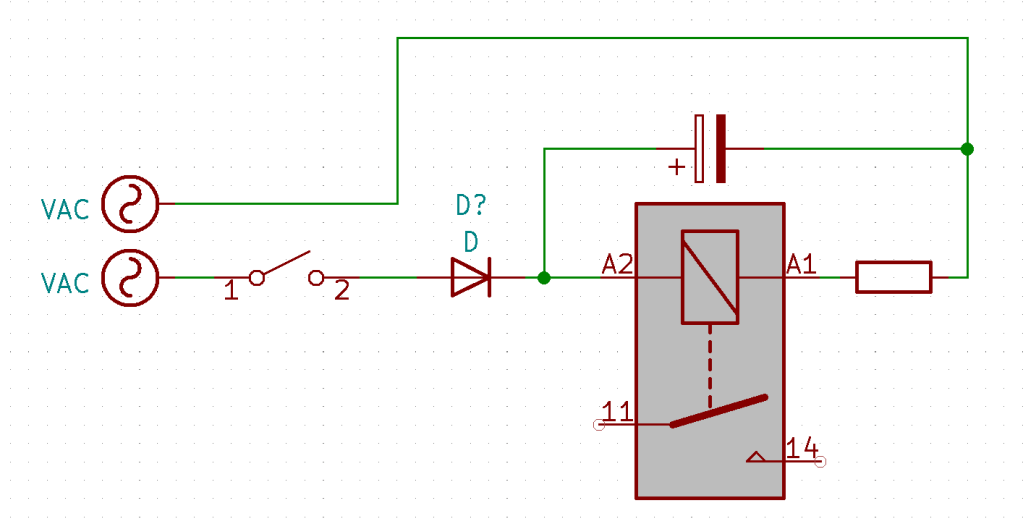
De spoelen van meeste printrelais kan je alleen met DC aanturen om menig redenen. Dit betekent dus ook dat je een relais niet met wisselspanning kan voeden (tenzij anders aangegeven). Als je met je oude Fleischmann of Marklin wisselspanningtrafo dit soort relais wilt aansturen. Dan is het nodig om of een gelijkrichter te gebruiken of een enkele diode met elco.
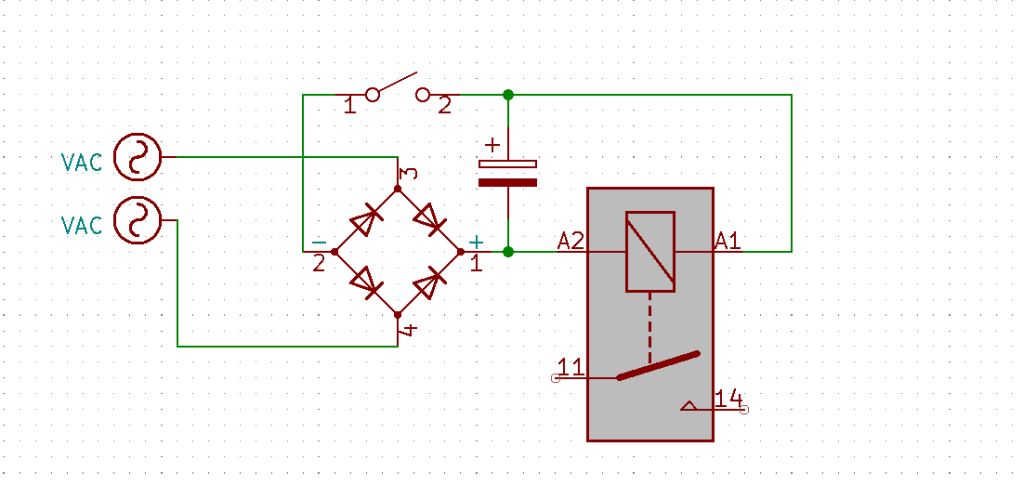
De schakelaar bedient hier het relais. Merk hier op dat het eigenlijk niet uitmaakt waar de schakelaar zit. Dit circuit richt de wisselspanning gelijk zodat je direct het relais kan voeden.
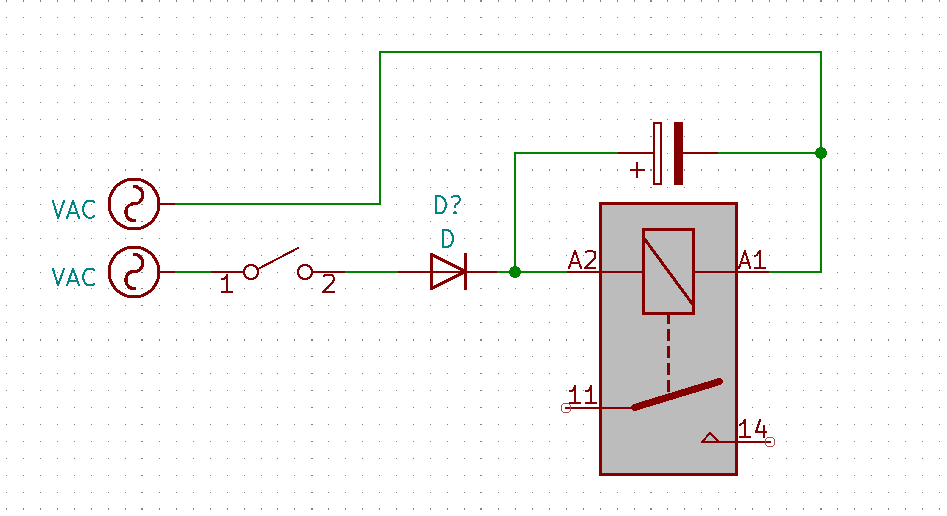
In onderstaand circuit doe ik hetzelfde maar met slechts 1 diode en condensator. Deze techniek wordt ook wel enkelzijdig gelijkrichten genoemd. Slechts de helft van de wisselspanning wordt hier gebruikt.
De meeste commerciële relais hebben spoelen voor 5V, 12V of voor 24V. Helaas zitten onze spanningen altijd ergens tussen de 16V en 19V. Hoewel meeste relais dit wel overleven door je er goed aan om toch een klein weerstandje in serie met met de spoel te zetten.